
环安大气环境影响评价系统AERMODSYSTEM耦合了《环境影响评价技术导则 大气环境》(HJ2.2-2018)推荐的AERMOD、AERMAP、AERMET、BPIPRIME模型,为用户提供导则要求的进一步预测的要求,软件操作简单、功能强大,表现丰富,适用于大气环境影响一级评价。
- AERMOD:高斯烟羽模式。
- AERMAP/AERMET:AERMOD地形/气象预处理程序。
- BPIPRIME:建筑物下洗处理程序
环安模型在线计算平台-AERSCREEN为评价等级与评价范围计算程序,系统构建在云平台,用户登录系统后使用。
- AERSCREEN:法规估算模型
- 登录地址:https://www.ihamodel.com/
模型介绍
AERMOD模式系统由美国国家环保局联合美国气象学会组建法规模式改善委员会(AERMIC)开发。AERMIC 的目标是开发一个能完全替代ISC3 的法规模型,新的法规模型将采用ISC3 的输入与输出结构、应用比ISC3模型新的扩散理论和计算机技术、且保证能够模拟目前ISC3 能模拟的大气过程与排放源。20世纪90 年代中后期,法规模式改善委员会在美国国家环保局的财政支持下,成功开发出AERMOD 扩散模型。AERMOD 包括三个预处理模式,即AERMET气象预处理和AERMAP 地形预处理模式和建筑物下洗预处理BPIP。
AERMOD系统以扩散统计理论为出发点,假设污染物的浓度分布在一定程度上服从高斯分布。模式系统可用于多种排放源(包括点源、线源、面源和体源)的排放,适用于乡村环境和城市环境、平坦地形和复杂地形、地面源和高架源等多种排放扩散情形的模拟和预测。AERMOD 具有下述特点:
- 以行星边界层(PBL)湍流结构及理论为基础。按空气湍流结构和尺度概念,湍流扩散由参数化方程给出,稳定度用连续参数表示;
- 中等浮力通量对流条件采用非正态的 PDF 模式;
- 考虑了对流条件下浮力烟羽和混合层顶的相互作用;
- 对简单地形和复杂地形进行了一体化的处理;
- 包括处理夜间城市边界层的算法;
- 可以考虑污染物的干湿沉降,且能考虑污染物NO2的NOx-NO2转化。
AERMOD模型可预测多种污染物,软件内置了《环境空气质量标准 GB3095-2012》中污染物:
| 污染物 | 预测值 | 平均时间 | 特征 | 污染源 |
| SO2 | 浓度干沉降湿沉降
总沉降 |
1小时2小时3小时
4小时 6小时 8小时 12小时 24小时 月均 长期平均 |
点源线源面源
体源 |
|
| NO2 | NOx-NO2转化 | |||
| CO | ||||
| PM10 | 颗粒物沉降 | |||
| PM2.5 | ||||
| TSP | ||||
| NOX | ||||
| Pb | ||||
| Bap | ||||
| 自定义污染物 |
界面操作
AERMODSYSTEM是基于GIS、Aermod为核心的界面化软件,软件绘图区为可视区域,显示用户设置的污染源、网格和离散点等对象。菜单栏提供工具和视图操作,工具栏提供诸多快捷操作。
 |
实现对视图的放大、缩小、移动和充满功能,实现对对象的选择功能。 |
 |
实现二维、三维、等值线和图层表现的调整。 |
 |
实现污染源、建筑物的鼠标绘制添加功能。 |
 |
实现网格和离散点矩阵的绘制添加功能。 |
 |
提供导入地形、导入天地图快捷操作 |
对象编辑菜单,可对对象实施编辑、复制、粘贴、删除、转换为其它对象和平行生成对象的操作。
多种网格
《环境影响评价技术导则 大气环境》预测网格点的设置应具有足够的分辨率以尽可能精确预测污染源对评价范围的最大影响,预测网格可以根据具体情况采用直角坐标网格或极坐标网格,并应覆盖整个评价范围。预测网格点设置方法如下:
| 预测网格方法 | 直角坐标网格 | 极坐标网格 | |
| 布点原则 | 网格等间距或近密远疏法 | 径向等间距或距源中心近密远疏法 | |
| 预测网格点网格距 | 距离源中心<5000m | <100 m | <100 m |
| 距离源中心<15000m | <250 m | <250 m | |
| 距离源中心>15000m | <500m | <500m | |
AERMODSYSTEM基于直角坐标网格、极坐标网格和离散点矩阵可以实现上述网格等间距布点和近密远疏布点原则。
直角坐标网格:包括均匀笛卡尔坐标网格与非均匀笛卡尔坐标网格。
极坐标网格:包括均匀极坐标网格与非均匀极坐标坐标网格。
离散点矩阵:使用一个离散点集合替代网格
| 单一均匀直角坐标网格 | 嵌套直角坐标网格实现近密远疏 |
 |
 |
| 极坐标网格 | 离散点矩阵 |
 |
 |
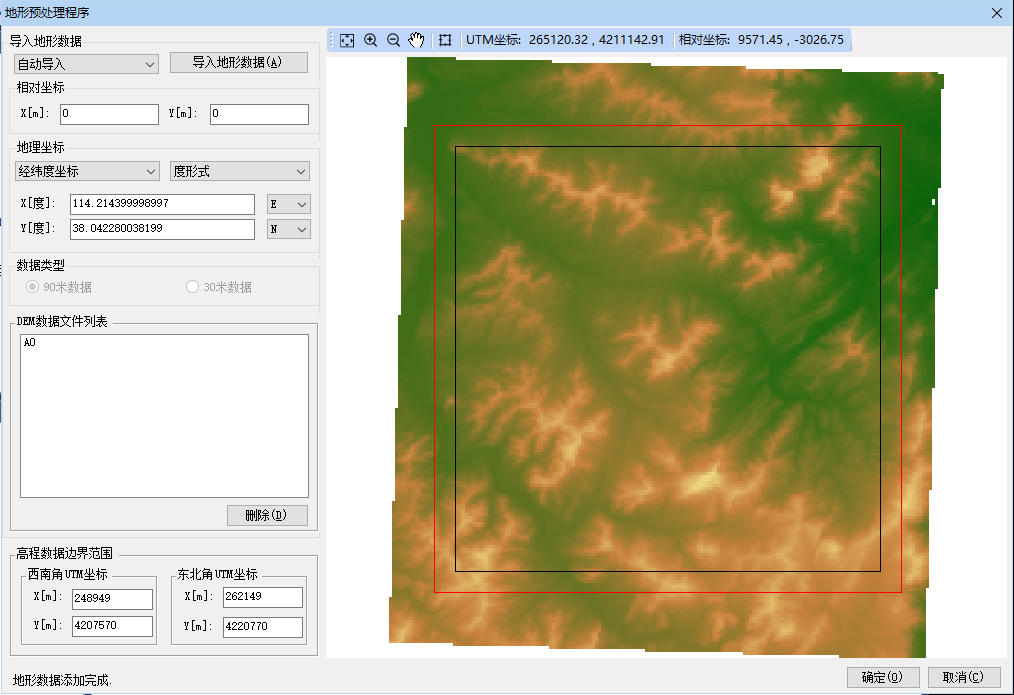
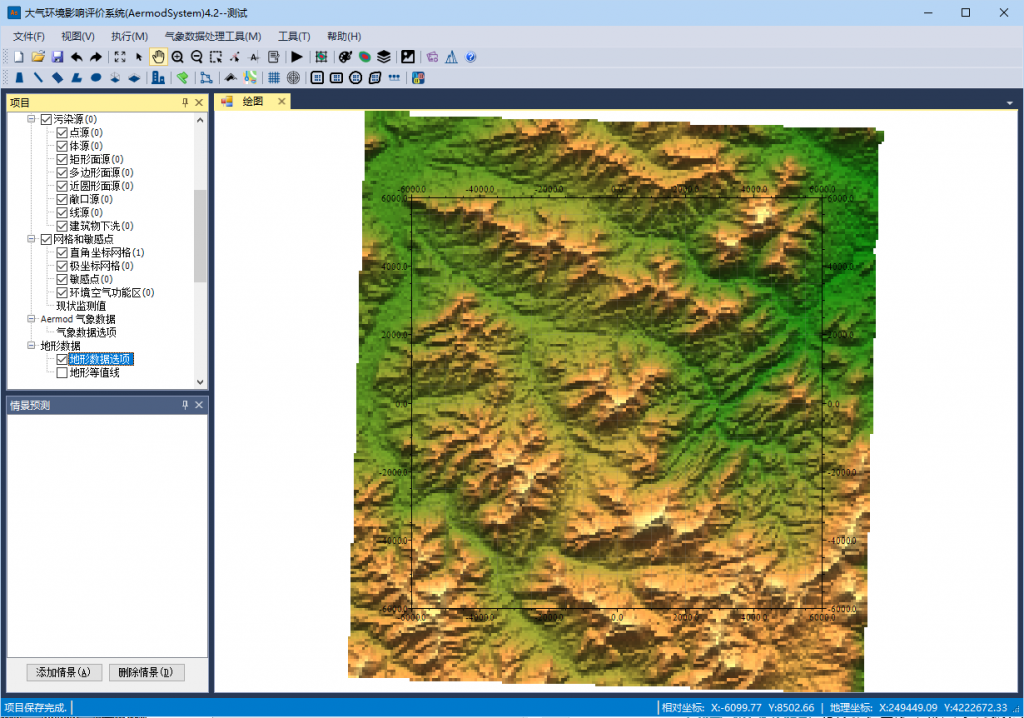
地形预处理工具
《环境影响评价技术导则 大气环境》规定进一步预测需要输入地形数据”。
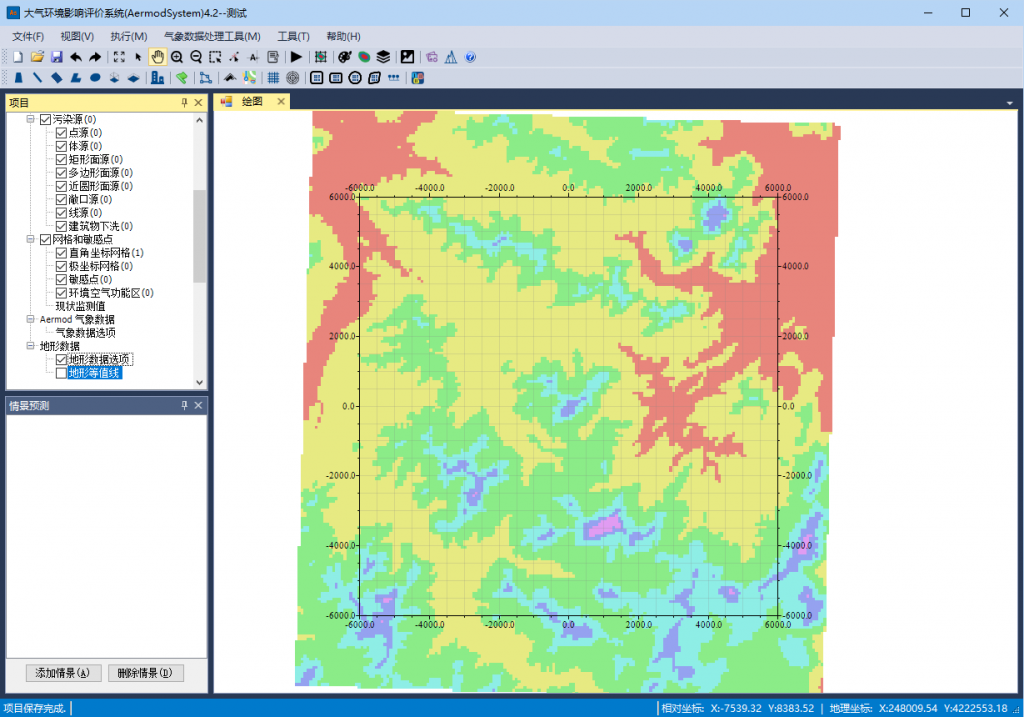
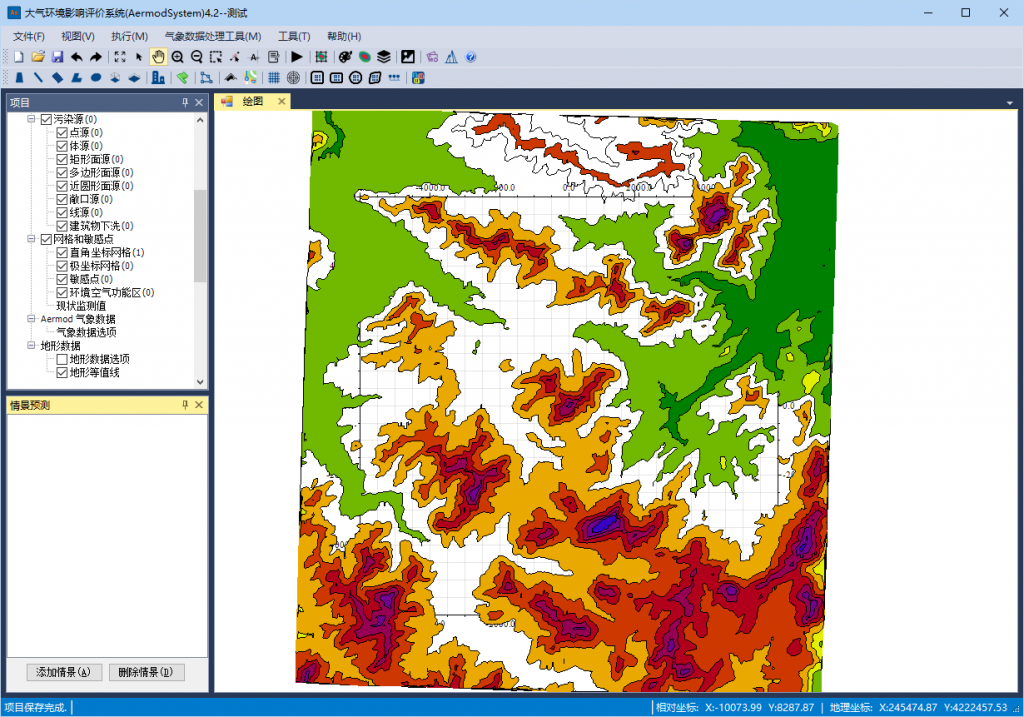
AERMODSYSTEM提供了在线自动下载SRTM 90米分辨率的地形数据的功能。软件根据用户定义的经纬度坐标把地形数据导入到AERMODSYSTEM中自动完成地形数据的预处理,而不需要进行数据格式转换,同时软件可以生成地形等值线。
底图
AERMODSYSTEM支持多种格式的底图,包括位图、在线天地图、在线谷歌地图、CAD图和GIS图的导入,并可以导入不限制数量的底图。
 |
 |
环境空气质量功能区
环境空气质量功能区:指为保护生态环境和人群健康的基本要求而划分的环境空气质量保护区。按GB2012的规定,环境空气质量功能区分为一类环境空气质量功能区、二类环境空气质量功能区。不同类别的环境空气质量功能区执行不同级别的环境质量标准。
AERMODSYSTEM提供了预测范围分区功能,可以为预测范围内的不同环境功能区设置不同的评价标准。
 |
 |
背景值叠加
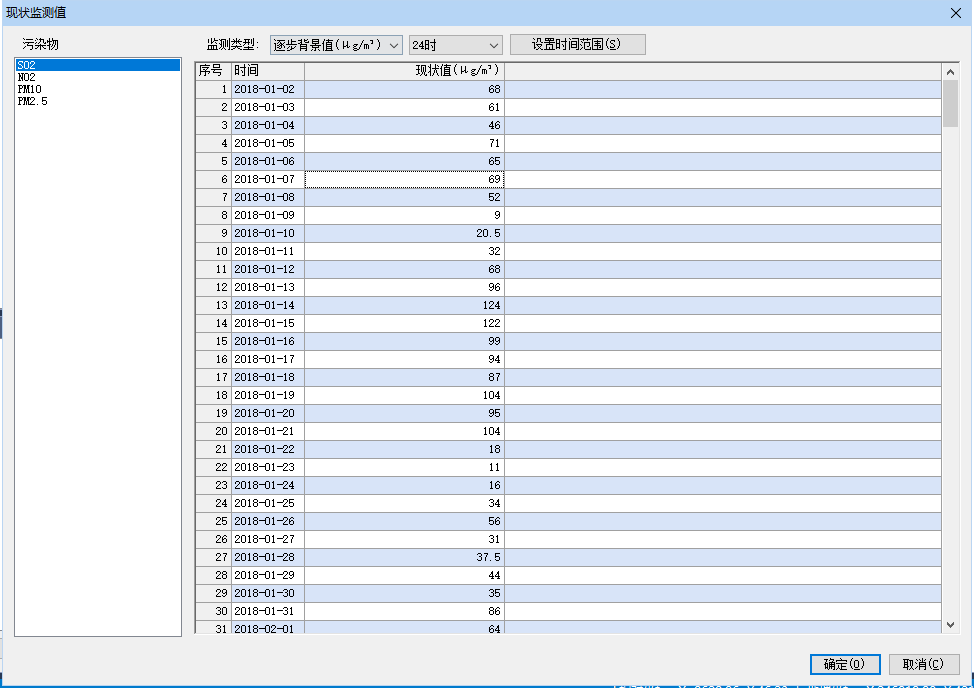
《环境影响评价技术导则 大气环境》评价方法中规定在环境影响叠加时,需要逐时、逐日叠加背景监测值或者叠加达标规划中达标年的目标浓度。
软件可以输入固定背景值来作为达标规划中达标年的目标浓度,也可以输入逐日、逐时背景值作为环境质量现状浓度。
 |
灵活的预测方案
《环境影响评价技术导则 大气环境》要求的预测场景比较复杂,软件采用预测情景和后处理方案相结合的形式来满足导则的要求,在预测情景中设定基础的预测方案,在后处理方案中对预测情景进行叠加计算。AERMODSYSTEM中输出方案设置中,提供用户多种选择,包括污染源、计算点、预测网格和浓度平均时间,完全可以满足导则要求。
- AERMODSYSTEM新增方案叠加运算,可以根据SO2、NO2、PM2.5方案计算总PM2.5的计算结果。
- AERMODSYSTEM新增削减方案设定,在后处理中,削减方案和新建方案可以叠加计算,并与背景监测值逐时/逐日叠加,得到最终分析结果。
 |
|
   |
符合导则的结果分析
- 各点最大值:列出了各离散点最大值和网格点最大值的短期浓度和长期浓度及浓度占标率。满足《环境影响评价技术导则 大气环境》最大浓度占标率评价要求。
- 保证率计算:给出各污染物在叠加背景值后,敏感点和网格点主要污染物保证率日平均质量浓度及浓度占标率和年平均浓度达标情况,满足叠加环境质量现状浓度下的要求。
- 网格填色图:满足《环境影响评价技术导则 大气环境》对网格浓度分布图要求,即绘制预测范围内的小时、日均和年均质量浓度等值线分布图。
- 结果输出:敏感点预测结果以表格给出,可以复制到EXCEL中,网格填色图可按导则要求绘制环境空气保护目标、项目位置、监测点位,以及风玫瑰、比例尺、图例等信息,最后输出图片。
| 网格点结果 | |
 |
|
| 敏感点和区域最大值 | |
 |
|
| 网格填色图和输出 | |
  |
|
注:产品介绍页面的中的“最大”、“最高”等表达,仅是专业属术语表达,摘录与中 华 人 民 共 和 国 国 家 环 境 保 护 标 准《环境影响评价技术导则 大气环境》。